Alice mobile robot
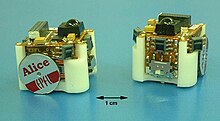
The Alice microrobot.
The Alice is a very small "sugarcube" mobile robot (2x2x2cm) developed at the (ASL) at the EPFL in Lausanne, Switzerland between 1998 and 2004. It has been part of the Institute of Robotics and Intelligent Systems (IRIS) at ETH Zurich since 2006.
It was designed with the following goals:
- Design an intelligent mobile robot as cheap and small as possible
- Study collective behavior with a large quantity of robots
- Acquire knowledge in highly integrated intelligent system
- Provide a hardware platform for further research
Technical specifications[]
Main Features[]
- Dimensions: 22 mm x 21 mm x 20 mm
- Velocity: 40 mm/s
- Power consumption: 12 - 17 mW
- Communication: local IR 6 cm, IR & radio 10 m
- Power autonomy: up to 10 hours
Main Robot[]
- 2 SWATCH motors with wheels and tires
- Microcontroller PIC16LF877 with 8Kwords Flash program memory
- Plastic frame and flex print with all the electronic components
- 4 active IR proximity sensors (reflection measurement)
- NiMH rechargeable battery
- Receiver for remote control
- 24 pin connector for extension, voltage regulator and power switch
Extension modules[]
- Linear camera 102 pixels
- Bidirectional radio communication
- Tactile sensors
- ZigBee ready radio module running TinyOS
Projects and applications[]
- 20 robots at Swiss Expo.02
- RobOnWeb
- Navigation and map building
- Soccer Kit : 2 teams of 3 Alices play soccer on an A4 page
- Collective behavior investigations: video.mov 1 and 2
- Mixed society robots-insects as part of the European project
- Investigation of levels of selection and relatedness on the evolution of cooperation in the ANTS project
References[]
- Autonomous Micro-Robots: Applications and Limitations. PhD Thesis EPFL n° 2753 PDF Abstract
- . (ASL) Index - Welcome. ETH Zurich - Home Page
External links[]
- Official website
- The homepage of the Alice microrobot at the Autonomous Systems Lab at EPFL no longer works or was moved; however,
- - Autonomous Systems Lab Robots where Alice and other robots reside
- - Autonomous Systems Lab at EPFL before 2006
- - Autonomous Systems Lab at ETH now since 2006
- Collaborative Coverage with up to 30 Alices
- [1] - ZigBee ready radio module running TinyOS
Categories:
- Prototype robots
- Robots of Switzerland
- Micro robots
- Differential wheeled robots
- 1998 robots
- Multi-robot systems