Centripetal Catmull–Rom spline
In computer graphics, the centripetal Catmull–Rom spline is a variant form of the Catmull-Rom spline, originally formulated by Edwin Catmull and Raphael Rom,[1] which can be evaluated using a recursive algorithm proposed by Barry and Goldman.[2] It is a type of interpolating spline (a curve that goes through its control points) defined by four control points , with the curve drawn only from to .




Definition[]

Let denote a point. For a curve segment defined by points and knot sequence , the centripetal Catmull–Rom spline can be produced by:
![{\mathbf {P}}_{i}=[x_{i}\quad y_{i}]^{T}](https://wikimedia.org/api/rest_v1/media/math/render/svg/94b787f14d85118f4669426adc26edc700fc97e7)



where





and
![t_{{i+1}}=\left[{\sqrt {(x_{{i+1}}-x_{i})^{2}+(y_{{i+1}}-y_{i})^{2}}}\right]^{{\alpha }}+t_{i}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3fbc45aa0c46308c07c445d0e1359cafca90a17)
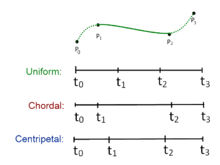
in which ranges from 0 to 1 for knot parameterization, and with . For centripetal Catmull–Rom spline, the value of is . When , the resulting curve is the standard ; when , the product is a .







Plugging into the spline equations and shows that the value of the spline curve at is . Similarly, substituting into the spline equations shows that at . This is true independent of the value of since the equation for is not needed to calculate the value of at points and .









The extension to 3D points is simply achieved by considering a generic 3D point and
![{\displaystyle \mathbf {P} _{i}=[x_{i}\quad y_{i}\quad z_{i}]^{T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/34f8d209346f24c717009326402cc571a17b77b4)

![{\displaystyle t_{i+1}=\left[{\sqrt {(x_{i+1}-x_{i})^{2}+(y_{i+1}-y_{i})^{2}+(z_{i+1}-z_{i})^{2}}}\right]^{\alpha }+t_{i}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4324aa06aa4fecb4a093c1fc499d931ecee8040f)
Advantages[]
Centripetal Catmull–Rom spline has several desirable mathematical properties compared to the original and the other types of Catmull-Rom formulation.[3] First, it will not form loop or self-intersection within a curve segment. Second, cusp will never occur within a curve segment. Third, it follows the control points more tightly.[4][vague]

Other uses[]
In computer vision, centripetal Catmull-Rom spline has been used to formulate an active model for segmentation. The method is termed active spline model.[5] The model is devised on the basis of active shape model, but uses centripetal Catmull-Rom spline to join two successive points (active shape model uses simple straight line), so that the total number of points necessary to depict a shape is less. The use of centripetal Catmull-Rom spline makes the training of a shape model much simpler, and it enables a better way to edit a contour after segmentation.
Code example in Python[]
The following is an implementation of the Catmull–Rom spline in Python that produces the plot shown beneath.
import numpy
import matplotlib.pyplot as plt
def CatmullRomSpline(P0, P1, P2, P3, nPoints=100):
"""
P0, P1, P2, and P3 should be (x,y) point pairs that define the Catmull-Rom spline.
nPoints is the number of points to include in this curve segment.
"""
# Convert the points to numpy so that we can do array multiplication
P0, P1, P2, P3 = map(numpy.array, [P0, P1, P2, P3])
# Parametric constant: 0.5 for the centripetal spline, 0.0 for the uniform spline, 1.0 for the chordal spline.
alpha = 0.5
# Premultiplied power constant for the following tj() function.
alpha = alpha/2
def tj(ti, Pi, Pj):
xi, yi = Pi
xj, yj = Pj
return ((xj-xi)**2 + (yj-yi)**2)**alpha + ti
# Calculate t0 to t4
t0 = 0
t1 = tj(t0, P0, P1)
t2 = tj(t1, P1, P2)
t3 = tj(t2, P2, P3)
# Only calculate points between P1 and P2
t = numpy.linspace(t1, t2, nPoints)
# Reshape so that we can multiply by the points P0 to P3
# and get a point for each value of t.
t = t.reshape(len(t), 1)
print(t)
A1 = (t1-t)/(t1-t0)*P0 + (t-t0)/(t1-t0)*P1
A2 = (t2-t)/(t2-t1)*P1 + (t-t1)/(t2-t1)*P2
A3 = (t3-t)/(t3-t2)*P2 + (t-t2)/(t3-t2)*P3
print(A1)
print(A2)
print(A3)
B1 = (t2-t)/(t2-t0)*A1 + (t-t0)/(t2-t0)*A2
B2 = (t3-t)/(t3-t1)*A2 + (t-t1)/(t3-t1)*A3
C = (t2-t)/(t2-t1)*B1 + (t-t1)/(t2-t1)*B2
return C
def CatmullRomChain(P):
"""
Calculate Catmull-Rom for a chain of points and return the combined curve.
"""
sz = len(P)
# The curve C will contain an array of (x, y) points.
C = []
for i in range(sz-3):
c = CatmullRomSpline(P[i], P[i+1], P[i+2], P[i+3])
C.extend(c)
return C
# Define a set of points for curve to go through
Points = [[0, 1.5], [2, 2], [3, 1], [4, 0.5], [5, 1], [6, 2], [7, 3]]
# Calculate the Catmull-Rom splines through the points
c = CatmullRomChain(Points)
# Convert the Catmull-Rom curve points into x and y arrays and plot
x, y = zip(*c)
plt.plot(x, y)
# Plot the control points
px, py = zip(*Points)
plt.plot(px, py, 'or')
plt.show()

Code example in Unity C#[]
using UnityEngine;
// a single catmull-rom curve
public struct CatmullRomCurve {
public Vector2 p0, p1, p2, p3;
public float alpha;
public CatmullRomCurve( Vector2 p0, Vector2 p1, Vector2 p2, Vector2 p3, float alpha ) {
( this.p0, this.p1, this.p2, this.p3 ) = ( p0, p1, p2, p3 );
this.alpha = alpha;
}
// Evaluates a point at the given t-value from 0 to 1
public Vector2 GetPoint( float t ) {
// calculate knots
const float k0 = 0;
float k1 = GetKnotInterval( p0, p1 );
float k2 = GetKnotInterval( p1, p2 ) + k1;
float k3 = GetKnotInterval( p2, p3 ) + k2;
// evaluate the point
float u = Mathf.LerpUnclamped( k1, k2, t );
Vector2 A1 = Remap( k0, k1, p0, p1, u );
Vector2 A2 = Remap( k1, k2, p1, p2, u );
Vector2 A3 = Remap( k2, k3, p2, p3, u );
Vector2 B1 = Remap( k0, k2, A1, A2, u );
Vector2 B2 = Remap( k1, k3, A2, A3, u );
return Remap( k1, k2, B1, B2, u );
}
static Vector2 Remap( float a, float b, Vector2 c, Vector2 d, float u ) {
return Vector2.LerpUnclamped( c, d, ( u - a ) / ( b - a ) );
}
float GetKnotInterval( Vector2 a, Vector2 b ) {
return Mathf.Pow( Vector2.SqrMagnitude( a - b ), 0.5f * alpha );
}
}
using UnityEngine;
// Draws a catmull-rom spline in the scene view,
// along the child objects of the transform of this component
public class CatmullRomSpline : MonoBehaviour {
[Range( 0, 1 )] public float alpha = 0.5f;
int PointCount => transform.childCount;
int SegmentCount => PointCount - 3;
Vector2 GetPoint( int i ) => transform.GetChild( i ).position;
CatmullRomCurve GetCurve( int i ) {
return new CatmullRomCurve( GetPoint(i), GetPoint(i+1), GetPoint(i+2), GetPoint(i+3), alpha );
}
void OnDrawGizmos() {
for( int i = 0; i < SegmentCount; i++ )
DrawCurveSegment( GetCurve( i ) );
}
void DrawCurveSegment( CatmullRomCurve curve ) {
const int detail = 32;
Vector2 prev = curve.p1;
for( int i = 1; i < detail; i++ ) {
float t = i / ( detail - 1f );
Vector2 pt = curve.GetPoint( t );
Gizmos.DrawLine( prev, pt );
prev = pt;
}
}
}
Code example in Unreal C++[]
float GetT( float t, float alpha, const FVector& p0, const FVector& p1 )
{
auto d = p1 - p0;
float a = d | d; // Dot product
float b = FMath::Pow( a, alpha*.5f );
return (b + t);
}
FVector CatmullRom( const FVector& p0, const FVector& p1, const FVector& p2, const FVector& p3, float t /* between 0 and 1 */, float alpha=.5f /* between 0 and 1 */ )
{
float t0 = 0.0f;
float t1 = GetT( t0, alpha, p0, p1 );
float t2 = GetT( t1, alpha, p1, p2 );
float t3 = GetT( t2, alpha, p2, p3 );
t = FMath::Lerp( t1, t2, t );
FVector A1 = ( t1-t )/( t1-t0 )*p0 + ( t-t0 )/( t1-t0 )*p1;
FVector A2 = ( t2-t )/( t2-t1 )*p1 + ( t-t1 )/( t2-t1 )*p2;
FVector A3 = ( t3-t )/( t3-t2 )*p2 + ( t-t2 )/( t3-t2 )*p3;
FVector B1 = ( t2-t )/( t2-t0 )*A1 + ( t-t0 )/( t2-t0 )*A2;
FVector B2 = ( t3-t )/( t3-t1 )*A2 + ( t-t1 )/( t3-t1 )*A3;
FVector C = ( t2-t )/( t2-t1 )*B1 + ( t-t1 )/( t2-t1 )*B2;
return C;
}
See also[]
References[]
- ^ Catmull, Edwin; Rom, Raphael (1974). "A class of local interpolating splines". In Barnhill, Robert E.; Riesenfeld, Richard F. (eds.). Computer Aided Geometric Design. pp. 317–326. doi:10.1016/B978-0-12-079050-0.50020-5. ISBN 978-0-12-079050-0.
- ^ Barry, Phillip J.; Goldman, Ronald N. (August 1988). A recursive evaluation algorithm for a class of Catmull–Rom splines. Proceedings of the 15st Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH 1988. Vol. 22. Association for Computing Machinery. pp. 199–204. doi:10.1145/378456.378511.
- ^ Yuksel, Cem; Schaefer, Scott; Keyser, John (July 2011). "Parameterization and applications of Catmull-Rom curves". Computer-Aided Design. 43 (7): 747–755. CiteSeerX 10.1.1.359.9148. doi:10.1016/j.cad.2010.08.008.
- ^ Yuksel; Schaefer; Keyser, Cem; Scott; John. "On the Parameterization of Catmull-Rom Curves" (PDF).
{{cite web}}: CS1 maint: multiple names: authors list (link) CS1 maint: url-status (link) - ^ Jen Hong, Tan; Acharya, U. Rajendra (2014). "Active spline model: A shape based model-interactive segmentation" (PDF). Digital Signal Processing. 35: 64–74. arXiv:1402.6387. doi:10.1016/j.dsp.2014.09.002. S2CID 6953844.
External links[]
- Catmull-Rom curve with no cusps and no self-intersections – implementation in Java
- Catmull-Rom curve with no cusps and no self-intersections – simplified implementation in C++
- Catmull-Rom splines – interactive generation via Python, in a Jupyter notebook
- Splines (mathematics)