Midpoint method




In numerical analysis, a branch of applied mathematics, the midpoint method is a one-step method for numerically solving the differential equation,
- .

The explicit midpoint method is given by the formula

the implicit midpoint method by

for Here, is the step size — a small positive number, and is the computed approximate value of The explicit midpoint method is sometimes also known as the modified Euler method,[1] the implicit method is the most simple collocation method, and, applied to Hamiltonian dynamics, a symplectic integrator. Note that the modified Euler method can refer to Heun's method,[2] for further clarity see List of Runge–Kutta methods.



The name of the method comes from the fact that in the formula above, the function giving the slope of the solution is evaluated at the midpoint between at which the value of is known and at which the value of needs to be found.





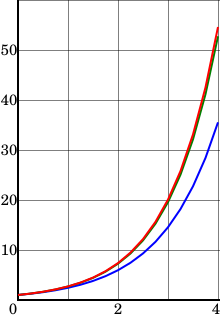
A geometric interpretation may give a better intuitive understanding of the method (see figure at right). In the basic Euler's method, the tangent of the curve at is computed using . The next value is found where the tangent intersects the vertical line . However, if the second derivative is only positive between and , or only negative (as in the diagram), the curve will increasingly veer away from the tangent, leading to larger errors as increases. The diagram illustrates that the tangent at the midpoint (upper, green line segment) would most likely give a more accurate approximation of the curve in that interval. However, this midpoint tangent could not be accurately calculated because we do not know the curve (that is what is to be calculated). Instead, this tangent is estimated by using the original Euler's method to estimate the value of at the midpoint, then computing the slope of the tangent with . Finally, the improved tangent is used to calculate the value of from . This last step is represented by the red chord in the diagram. Note that the red chord is not exactly parallel to the green segment (the true tangent), due to the error in estimating the value of at the midpoint.




The local error at each step of the midpoint method is of order , giving a global error of order . Thus, while more computationally intensive than Euler's method, the midpoint method's error generally decreases faster as .



The methods are examples of a class of higher-order methods known as Runge–Kutta methods.
Derivation of the midpoint method[]





The midpoint method is a refinement of the Euler's method

and is derived in a similar manner. The key to deriving Euler's method is the approximate equality

which is obtained from the slope formula

and keeping in mind that

For the midpoint methods, one replaces (3) with the more accurate

when instead of (2) we find

One cannot use this equation to find as one does not know at . The solution is then to use a Taylor series expansion exactly as if using the Euler method to solve for :





which, when plugged in (4), gives us

and the explicit midpoint method (1e).
The implicit method (1i) is obtained by approximating the value at the half step by the midpoint of the line segment from to

and thus

Inserting the approximation for results in the implicit Runge-Kutta method



which contains the implicit Euler method with step size as its first part.

Because of the time symmetry of the implicit method, all terms of even degree in of the local error cancel, so that the local error is automatically of order . Replacing the implicit with the explicit Euler method in the determination of results again in the explicit midpoint method.


See also[]
- Rectangle method
- Heun's method
- Leapfrog integration and Verlet integration
Notes[]
- ^ Süli & Mayers 2003, p. 328
- ^ Burden & Faires 2011, p. 286
References[]
- Griffiths,D. V.; Smith, I. M. (1991). Numerical methods for engineers: a programming approach. Boca Raton: CRC Press. p. 218. ISBN 0-8493-8610-1.
- Süli, Endre; Mayers, David (2003), An Introduction to Numerical Analysis, Cambridge University Press, ISBN 0-521-00794-1.
- Burden, Richard; Faires, John (2010). Numerical Analysis. Richard Stratton. p. 286. ISBN 0-538-73351-9.
- Numerical differential equations
- Runge–Kutta methods