Subderivative
In mathematics, the subderivative, subgradient, and subdifferential generalize the derivative to convex functions which are not necessarily differentiable. Subderivatives arise in convex analysis, the study of convex functions, often in connection to convex optimization.
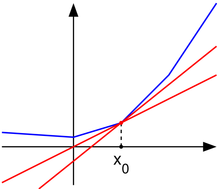
Let be a real-valued convex function defined on an open interval of the real line. Such a function need not be differentiable at all points: For example, the absolute value function f(x)=|x| is nondifferentiable when x=0. However, as seen in the graph on the right (where f(x) in blue has non-differentiable kinks similar to the absolute value function), for any x0 in the domain of the function one can draw a line which goes through the point (x0, f(x0)) and which is everywhere either touching or below the graph of f. The slope of such a line is called a subderivative (because the line is under the graph of f).

Definition[]
Rigorously, a subderivative of a convex function at a point x0 in the open interval I is a real number c such that

for all x in I. One may show that the set of subderivatives at x0 for a convex function is a nonempty closed interval [a, b], where a and b are the one-sided limits


which are guaranteed to exist and satisfy a ≤ b[citation needed].
The set [a, b] of all subderivatives is called the subdifferential of the function f at x0. Since f is convex, if its subdifferential at contains exactly one subderivative, then f is differentiable at .[1]

Example[]
Consider the function f(x)=|x| which is convex. Then, the subdifferential at the origin is the interval [−1, 1]. The subdifferential at any point x0<0 is the singleton set {−1}, while the subdifferential at any point x0>0 is the singleton set {1}. This is similar to the sign function, but is not a single-valued function at 0, instead including all possible subderivatives.
Properties[]
- A convex function f:I→R is differentiable at x0 if and only if the subdifferential is made up of only one point, which is the derivative at x0.
- A point x0 is a global minimum of a convex function f if and only if zero is contained in the subdifferential, that is, in the figure above, one may draw a horizontal "subtangent line" to the graph of f at (x0, f(x0)). This last property is a generalization of the fact that the derivative of a function differentiable at a local minimum is zero.
- If and are convex functions with subdifferentials and with being the interior point of one of the functions, then the subdifferential of is (where the addition operator denotes the Minkowski sum). This reads as "the subdifferential of a sum is the sum of the subdifferentials."[2]







The subgradient[]
The concepts of subderivative and subdifferential can be generalized to functions of several variables. If f:U→ R is a real-valued convex function defined on a convex open set in the Euclidean space Rn, a vector in that space is called a subgradient at a point x0 in U if for any x in U one has


where the dot denotes the dot product. The set of all subgradients at x0 is called the subdifferential at x0 and is denoted ∂f(x0). The subdifferential is always a nonempty convex compact set.
These concepts generalize further to convex functions f:U→ R on a convex set in a locally convex space V. A functional ∗ in the dual space V∗ is called subgradient at x0 in U if for all x in U

The set of all subgradients at x0 is called the subdifferential at x0 and is again denoted ∂f(x0). The subdifferential is always a convex closed set. It can be an empty set; consider for example an unbounded operator, which is convex, but has no subgradient. If f is continuous, the subdifferential is nonempty.
History[]
The subdifferential on convex functions was introduced by Jean Jacques Moreau and R. Tyrrell Rockafellar in the early 1960s. The generalized subdifferential for nonconvex functions was introduced by F.H. Clarke and R.T. Rockafellar in the early 1980s.[3]
See also[]
References[]
- ^ Rockafellar, R. T. (1970). Convex Analysis. Princeton University Press. p. 242 [Theorem 25.1]. ISBN 0-691-08069-0.
- ^ Lemaréchal, Claude; Hiriart-Urruty, Jean-Baptiste (2001). Fundamentals of Convex Analysis. Springer-Verlag Berlin Heidelberg. p. 183. ISBN 978-3-642-56468-0.
- ^ Clarke, Frank H. (1983). Optimization and nonsmooth analysis. New York: John Wiley & Sons. pp. xiii+308. ISBN 0-471-87504-X. MR 0709590.
- Borwein, Jonathan; Lewis, Adrian S. (2010). Convex Analysis and Nonlinear Optimization : Theory and Examples (2nd ed.). New York: Springer. ISBN 978-0-387-31256-9.
- Hiriart-Urruty, Jean-Baptiste; Lemaréchal, Claude (2001). Fundamentals of Convex Analysis. Springer. ISBN 3-540-42205-6.
- Zălinescu, C. (2002). Convex analysis in general vector spaces. World Scientific Publishing Co., Inc. pp. xx+367. ISBN 981-238-067-1. MR 1921556.
External links[]
- "Uses of ". Stack Exchange. July 15, 2002.

- Generalizations of the derivative
- Convex optimization
- Variational analysis