4-polytope
| {3,3,3} | {3,3,4} | {4,3,3} |
|---|---|---|
 5-cell Pentatope 4-simplex |
 16-cell Orthoplex 4-orthoplex |
 8-cell Tesseract 4-cube |
| {3,4,3} | {5,3,3} | {3,3,5} |
 24-cell Octaplex |
 600-cell Tetraplex |
 120-cell Dodecaplex |
In geometry, a 4-polytope (sometimes also called a polychoron,[1] polycell, or polyhedroid) is a four-dimensional polytope.[2][3] It is a connected and closed figure, composed of lower-dimensional polytopal elements: vertices, edges, faces (polygons), and cells (polyhedra). Each face is shared by exactly two cells. The 4-polytopes were discovered by the Swiss mathematician Ludwig Schläfli before 1853.[4]
The two-dimensional analogue of a 4-polytope is a polygon, and the three-dimensional analogue is a polyhedron.
Topologically 4-polytopes are closely related to the uniform honeycombs, such as the cubic honeycomb, which tessellate 3-space; similarly the 3D cube is related to the infinite 2D square tiling. Convex 4-polytopes can be cut and unfolded as nets in 3-space.
Definition[]
A 4-polytope is a closed four-dimensional figure. It comprises vertices (corner points), edges, faces and cells. A cell is the three-dimensional analogue of a face, and is therefore a polyhedron. Each face must join exactly two cells, analogous to the way in which each edge of a polyhedron joins just two faces. Like any polytope, the elements of a 4-polytope cannot be subdivided into two or more sets which are also 4-polytopes, i.e. it is not a compound.
Geometry[]
The convex regular 4-polytopes are the four-dimensional analogues of the Platonic solids. The most familiar 4-polytope is the tesseract or hypercube, the 4D analogue of the cube.
The convex regular 4-polytopes can be ordered by size as a measure of 4-dimensional content (hypervolume) for the same radius. Each greater polytope in the sequence is rounder than its predecessor, enclosing more content[5] within the same radius. The 4-simplex (5-cell) is the limit smallest case, and the 120-cell is the largest. Complexity (as measured by comparing configuration matrices or simply the number of vertices) follows the same ordering.
| Regular convex 4-polytopes | |||||||
|---|---|---|---|---|---|---|---|
| Symmetry group | A4 | B4 | F4 | H4 | |||
| Name | 5-cell Hyper-tetrahedron |
16-cell Hyper-octahedron |
8-cell Hyper-cube |
24-cell
|
600-cell Hyper-icosahedron |
120-cell Hyper-dodecahedron | |
| Schläfli symbol | {3, 3, 3} | {3, 3, 4} | {4, 3, 3} | {3, 4, 3} | {3, 3, 5} | {5, 3, 3} | |
| Coxeter mirrors | |||||||
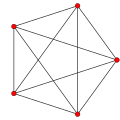
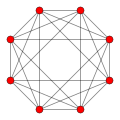
| Graph |
|
|
|
|
|
| |
| Vertices | 5 | 8 | 16 | 24 | 120 | 600 | |
| Edges | 10 | 24 | 32 | 96 | 720 | 1200 | |
| Faces | 10 triangles | 32 triangles | 24 squares | 96 triangles | 1200 triangles | 720 pentagons | |
| Cells | 5 tetrahedra | 16 tetrahedra | 8 cubes | 24 octahedra | 600 tetrahedra | 120 dodecahedra | |
| Tori | 1 5-tetrahedron | 2 8-tetrahedron | 2 4-cube | 4 6-octahedron | 20 30-tetrahedron | 12 10-dodecahedron | |
| Inscribed | 120 in 120-cell | 1 16-cell | 2 16-cells | 3 8-cells | 5 24-cells x 5 | 5 600-cells x 2 | |
| Great polygons | 2
| ||||||