Lego Mindstorms
hideThis article has multiple issues. Please help or discuss these issues on the talk page. (Learn how and when to remove these template messages)
|
 Robot based on the NXT platform | |
| Subject | Robotics |
|---|---|
| Availability | 1998– |
| Official website | |
Lego Mindstorms is a hardware and software structure which is produced by Lego for the development of programmable robots based on Lego building blocks. Each version of the system includes a computer Lego brick that controls the system, a set of modular sensors and motors, and Lego parts from the Technic line to create the mechanical systems.
There have been five generations of the Mindstorms platform: the original Robotics Invention System, NXT, NXT 2.0, EV3, and Robot Inventor kit. With each platform release, the motor and sensor capabilities expanded. The one before last system, Lego Mindstorms EV3, was released on 1 September 2013. Some robot competitions use this set, such as the FIRST Lego League and the World Robot Olympiad.
History[]
Background[]
In 1985 Seymour Papert, Michael Resnick and Stephen Ocko created a company called Microworlds with the intent of developing a construction kit that could be animated by computers for educational purposes.[1]:14 Papert had previously created the Logo programming language as a tool to "support the development of new ways of thinking and learning",[2]:xiv and employed "Turtle" robots to physically act out the programs in the real world.[2]:55–56 As the types of programs created were limited by the shape of the Turtle, the idea came up to make a construction kit that could use Logo commands to animate a creation of the learner's own design.[3]:3 Similar to the "floor turtle" robots used to demonstrate Logo commands in the real world, a construction system that ran Logo commands would also demonstrate them in the real world, but allowing the child to construct their own creations benefitted the learning experience by putting them in control [4] In considering which construction system to partner with, they wanted a "low floor high ceiling" approach, something that was easy to pick up but very powerful. To this end, they decided to use LEGO bricks due to the system and diversity of pieces, and the Logo language due to the groups familiarity with the software and its ease of use.[1]:14 LEGO was receptive to collaboration, particularly because its educational division had founding goals very similar to those of the Microworlds company. The collaboration very quickly moved to the newly minted MIT Media lab, where there was an open sharing of ideas.[1]:14 As a sponsor of the entire lab, LEGO was allowed royalty free rights to mass-produce any technology produced by Papert, Resnick and Ocko's group; and was also allowed to send an employee over to assist with research, so they sent engineer Alan Tofte (also spelled Toft) who helped with the design of the programmable brick.[1]:35[5]:74 As another part of the MIT Media Lab was community outreach, so the bricks would be used working with children in schools for both research and educational purposes.
LEGO/Logo, LEGO tc Logo (1985)[]
The first experiments of combining LEGO and the Logo programming language was called LEGO/Logo and it started in 1985.[4] Similar to the "floor turtles" used to demonstrate Logo commands in the real world, LEGO/Logo used Logo commands to animate Lego creations. It is important that children could build their own machines to program, as they would then care more about their projects and be more willing to explore the mathematical concepts involved in making them move. The LEGO/Logo system allowed children to create their own designs and experiments, offered multiple paths for learning and encouraged a sense of community. First, machines are built out LEGO The machines are then connected to a computer and programmed in a modified version of Logo. The LEGO/Logo system introduced new types of parts for making creations, such as motors sensors and lights. The motors and sensors are connected to an interface box which is communicates with a computer.[4] LEGO/Logo would later be commercialized by the LEGO group LEGO tc Logo.[3]:3 It was observed that using the LEGO/Logo system, children developed a form of knowledge about the physical world that allowed those even without mathematics or verbal skills to solve problems effectively using the system. [5]:23
Logo Brick 1st Generation, "Grey Brick" (1986)[]
While LEGO/Logo was powerful, it was restricted somewhat by the requirement to have the creations attached to a computer.[3]:3 The group began working on further iterations of the LEGO/ LOGO environment to produce a robot that could interact not only with the environment but with other robots programmed in the same system.[5]:24 The experiments with an untethered brick (called the Logo Brick or "Grey Brick") began in the fall of 1986. To speed up the design process, the Logo Brick contained the processor chip from an Apple II computer. It ran an adapted version of LEGO/Logo written for the Apple II computer.[5]:74 The LEGO/Logo interface box, The previous development of the group, had only two sensor ports available, which the design team observed were not always enough. To address this, they gave the Logo Brick four sensor ports. The Logo Brick was made out of a modified LEGO battery box and was about the size of a deck of cards.[5]:74, 23 The Logo Brick was tested in schools.
LEGO Mindstorms and RCX (1996)[]
While LEGO had been interested in mass-producing the programmable brick concept for a while, they had to wait until enough people owned personal computers and the components required to produce the intelligent brick went down in price.[1]:25 Development of what would later be known as LEGO Mindstorms started in 1996 as the first product of the newly created home-learning division of LEGO Education (LEGO Dacta). The product's name of "Mindstorms" was intended to express the user experience of the product, it is named after Papert's book Mindstorms, as the user experience was similar to the educational constructivism concepts described in his book.[6] The LEGO home education team used the insights that MIT researchers discovered from testing the 3rd Generation Logo Brick ("Red Brick") in schools as the basis for the development of the mass-produced programmable brick.[3]:5 The physical programmable brick was re-engineered from the ground up, as the experimental programmable bricks were not designed for robustness or cost-effective manufacturing.[1]:19, 26 The programming language of the product was developed with help from members of the MIT Media lab. LEGO decided to use a Visual programming language for Mindstorms, inspired by the LOGOBlocks language previously used with programmable brick experiments, in order to make the product accessible to children who might be unfamiliar with programming.[1]:29 The chosen target demographic of LEGO Mindstorms was intentionally narrow, in order to garner positive press by outselling expectations. The decision was made to aim the product towards 10 to 14-year-old boys, partially because it was LEGO's bread-and-butter demographic, and partially based on market research (not substantiated by the findings of the MIT Media Lab) which concluded that this demographic would be most attracted to computerized toys . This choice of target demographic directly informed the color of the RCX brick (which was made yellow and black to resemble construction equipment) and the sample uses for the Mindstorms kit (such as making autonomous robots).[1]:28
The project's at-first low profile allowed the Mindstorms team the freedom to develop the product using operating procedures then-unorthodox to the LEGO Group.[7]:1062 Unlike traditional LEGO sets, the Mindstorms Robotics Invention System did not have a main model, nor was the play driven by storytelling.[citation needed] To bridge the gap between this new play experience and pre-existing LEGO ones, the Mindstorms team created a lot of opportunites for people interested in the product to engage with each other, such as the creation of Mindstorms.com, Mindstorms Discovery Centers, and the FIRST Lego League.[6] The creation of these experiences was done through partnerships with a relatively large amount of external groups that the Mindstorms team interacted with as equal partners, something that was uncommon for the LEGO group at the time.[7]:1063 To ease tensions between Mindstorms and more conventional products, the project team was given autonomy from LEGO's product development process and instead reported directly to the company's senior management.[7]:1064
Promotion of the LEGO Mindstorms Robotics Invention System began 6 months before the product was planned to launch.[6] The product was first soft launched with the opening of the Mindstorms Discovery Center at the Museum of Science and Industry, where children could interact with the Mindstorms Robotics Invention System to complete set tasks, getting them familiar with the product.[8] The Mindstorms product was launched concurrently with LEGO Cybermaster, another LEGO product spun off from the MIT programmable brick technology that was more in line with the traditional product philosophies of the LEGO group.[7]:1067
Instead of being sold at toy stores, the product was sold at electronics stores like BestBuy and CompUSA, due to the relatively high cost of the set.[6] Mindstorms was particularly different from other LEGO products at the time.
Pre-Mindstorm[]
Before Mindstorms, Lego had previously done some experimentation with robotic sets. One of the main foundations of these sets was the Lego Technic system and its 4.5 V and later 9 V system for electrical peripherals that had been evolving through the 1980s.
Computer Interfaces[]
One of the first examples of programmable Lego was the LEGO Interface-A adapter, used for the educational-only Lego Dacta TC-Logo system. These sets from the mid-late 1980s provided a dedicated hardware interface to control the Lego Technic 4.5 V system using a computer, and for the first time it introduced electric Lego sensors. This interface was controlled from an IBM-PC or Apple-IIe by the use of a special version of Logo, a simple programming language designed for use in children's education. In the mid-1990s, the Lego Dacta Control Lab released as a follow-up for Lego 9 V system, using a standard serial port rather than a custom hardware interface card. This move also introduced new 9 V sensors, which would later become a key component for the first-generation Mindstorms sets. It is worth noting that the Control Lab had dedicated ports for active and passive sensors, while later products like first-generation Mindstorms provided support for both kinds on the same ports.
Technic Control Center[]
The control center (1990) was the first programmable standalone Lego product, in the sense of being able to store sequence-based programs and run them. It featured three output ports and manual control, and it was only capable of storing linear sequences of manual input plus timing information. It could store up to two programs at once.
The manual controls could be used to independently control the three motors. To record a program, the controller had to be put in programming mode, and then any manual control would be recorded to the program. Pauses could also be included in a program. When the recording was done, the controller could successfully recall and execute any manual action performed during the recording. The executing program could be set to loop infinitely.
Cybermaster[]

Cybermaster was mainly sold in Europe and Australia/New Zealand and was available for a short time in the United States via the Lego Club magazines. It was aimed at an older audience as an early attempt of merging robotics with Legos.
The brick shares many (especially software) features with the RCX but differs in appearance and technical specifications: one output (plus two built-in) and four sensors.
- It uses RF (27 MHz R/C band) instead of IR for communication.
- It has two built-in motors with integrated tachometers and speedometers.
- It is limited to passive sensors (a simple A/D with internal pull-up resistors).
- The sensors shipped with it are color-coded and have internal resistors in their open state (allowing the Pbrick to sense which sensor is attached to which port).
- It has a fixed firmware (so it cannot be upgraded or replaced).
- It has limited RAM for programs (395 bytes)[clarification needed] and only one program slot.
Despite its obvious limitations, it has a number of advantages over its 'big brother', the RCX.
- The RF link has a greater range and is omnidirectional.
- The built-in tachometer and speedometer sensors on the internal motors provide the same function as the external rotation sensor to the RCX, but without using up sensor ports.
This makes it very useful for various mobile platforms and for performing advanced motion/positioning tasks.
It talks the same protocol as the RCX but cannot communicate directly with it (due to IR vs RF) but with a repeater (a computer with 2 serial ports and a simple program) they can communicate indirectly.
Codepilot[]
Sold as part of the Barcode Truck kit, this unit was the first programmable brick (or Pbrick). It features a single motor, a single touch sensor, and a light sensor. It is programmed by setting it to 'learn' and using the light sensor to feed in barcoded commands. The command set is very limited. Since barcode is just a series of variances in light, this form of command entry was dubbed VLL (Visual Light Link) and has been used in several later Lego models.
Robotics Discovery Set and Droid/Darkside Developer Kit[]
The Robotics Discovery Set was a more affordable and simpler package than the Robotics Invention Set. Instead of being based on the RCX, it had its own programmable brick called the Scout. An even simpler version of the Scout would be featured in two Star-Wars-themed Mindstorm sets as well.
Scout[]
Lego also released a blue computer called the Scout, which has 2 sensor ports, 2 motor ports (plus one extra if linked with a Micro Scout using a fiber optic cable), and a built-in light sensor, but no PC interface. It comes with the Robotics Discovery Set. The Scout can be programmed from a collection of built-in program combinations. In order to program the Scout, a user must enable "power mode" on it. The Scout can store one program.
The Scout is based on a Toshiba microcontroller with 32 KB of ROM and 1 KB of RAM, where about 400 bytes are available for user programs. Due to the extremely limited amount of RAM, many predefined subroutines were provided in ROM. The Scout only supports passive external sensors, which means that only touch, temperature and other unpowered sensors can be used. The analog-to-digital converters used in the Scout only have a resolution of 8 bits, in contrast to the 10-bit converters of the RCX.[9]
There was a plan for Lego to create a booster set that allows you to program the Scout from a computer with software such as RCX code. However, due to the complexity of this project, it was abandoned.
The RCX can control the Scout brick using the "Send IR Message" program block. The RCX does all of the controlling, and therefore can be programmed with the PC, while the Scout accepts commands. The Scout brick must have all of its options set to "off" during this process.
Micro Scout[]
The Micro Scout was added as an entry-level to Lego robotics. It is a very limited Pbrick with a single built-in light sensor and a single built-in motor. It has seven built-in programs and can be controlled by a Scout, Spybotics or RCX unit using VLL. Like the Scout, the Micro Scout is also based on a microcontroller from Toshiba.
The unit was sold as part of the Droid Developer Kit (featuring R2-D2) and later the Darkside Developer Kit (featuring an AT-AT Imperial Walker).
Robotics Invention System[]
The main core of the first generation of Mindstorms sets were the Robotics Invention System sets. These were based around the RCX (Robotic Command eXplorers) brick and the 9 V LEGO Technic peripherals available at the time. It also includes three touch-sensors and an optical sensor, using the technology from the earlier 9 V sensors from the pre-Mindstorms sets.
RCX[]
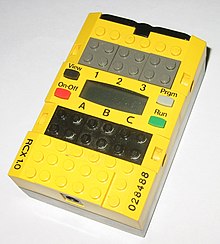
The RCX is based on the 8-bit Renesas H8/300 microcontroller, including 32 KB of ROM for low-level IO functions, along with 32 KB of RAM to store high-level firmware and user programs. The RCX is programmed by uploading a program using a dedicated infrared interface. After the user uploads a program, the RCX can run it on its own without the need for computer access. Programs may make use of three sensor input ports and three 9 V output ports, in addition to the IR interface, enabling several RCX bricks to communicate. A built-in LCD can display the battery level, the status of the input/output ports, which program is selected or running, and other information.[10]
Version 1.0 RCX bricks feature a power adapter jack rather than merely batteries. In version 2.0 (as well as later 1.0s included in the RIS 1.5), the power adapter jack was removed. Power adapter-equipped RCX bricks were popular for stationary robotics projects (such as robot arms) or for controlling Lego model trains. In the latter context, the RCX might be programmed with Digital Command Control (DCC) software to operate multiple wired trains.
The IR interface on the RCX is able to communicate with Spybots, Scout Bricks, Lego Trains, and the NXT (using a third-party infrared link sensor). The RCX 1.0 IR receiver carrier frequency is 38.5 kHz, while the RCX 2.0 IR carrier frequency is 76 kHz. Both versions can transmit on either frequency. The RCX communicates with a computer using a Serial or USB IR tower. As the RCX is discontinued, support for the interface is limited on more recent operating systems than Windows XP.
All RCX versions have a unique number printed on them, which could be registered on the now-defunct Lego Mindstorms RCX website. This was necessary to obtain technical support. The first RCX produced is marked "000001," and was on display at the Mindstorms 10th Anniversary event.[11]
Expansion Packs[]
Six expansion-packs were made for the Robotics Invention System. Most expansion sets contains more parts and instructions, while other expansion sets were more ambitious. These sets include:
- RoboSports
- Extreme Creatures
- Ultimate Accessory Set
- Vision Command
- Exploration Mars
- Ultimate Builders Set
Notable sets include the Ultimate Accessory Set, containing more sensors and an IR remote-control for sending commands to the RCX. Another notable set, Vision Command, came with a Lego Camera and dedicated software. This software was capable of detecting different lightings, motion, and colors.
Lego Mindstorms NXT[]
Lego Mindstorms NXT was a programmable robotics kit released by Lego in July 2006, replacing the first-generation LEGO Mindstorms kit.[12] The kit consists of 577 pieces, including: 3 servo motors, 4 sensors (ultrasonic, sound, touch, and light), 7 connection cables, a USB interface cable, and the NXT Intelligent Brick. The Intelligent Brick is the "brain" of a Mindstorms machine. It lets the robot autonomously perform different operations. The kit also includes NXT-G, a graphical programming environment that enables the creation and downloading of programs to the NXT. The software also has instructions for 4 robots: Alpha-Rex (a humanoid), Tri-Bot (a car), Robo-Arm T-56 (a robotic arm), and Spike (a scorpion)
Lego Mindstorms NXT Educational Version[]
This is the educational version of the NXT set from Lego Education, which is made for school use. Software was sold separately (but can be downloaded for free now), and the Education Resource Set for the best use. It includes a light sensor, an ultrasonic sensor, a sound sensor, three lamps and a pair of touch sensors. The first set consists of about 400 pieces, and the extra set consists of about 600 pieces. The Education Version is most suited for those who have older versions of Mindstorms sets around, mostly thanks to its three converter cables.
Lego Mindstorms NXT 2.0[]
The Lego Mindstorms NXT 2.0 was launched on 5 August 2009. It contains 619 pieces (includes sensors and motors), two Touch Sensors, an Ultrasonic Sensor, and introduced a new Color Sensor. The NXT 2.0 uses Floating Point operations whereas earlier versions use Integer operation.[13] The kit costs around US$280.

Lego Mindstorms EV3[]

The Lego Mindstorms EV3 is the third generation Lego Mindstorms product. EV3 is a further development of the NXT.[14][15] The system was released on 1 September 2013. The LEGO MINDSTORMS EV3 set includes motors (2 large servo motor and 1 medium servo motor), sensors (2 touch sensors, ultrasonic sensor, color sensor, infrared sensor, and the new gyro sensor) , the EV3 programmable brick, 550+ LEGO Technic elements and a remote control (the Infrared Beacon, which is only on Home/Retail mode). The EV3 can be controlled by smart-devices. It can boot an alternative operating system from a microSD card, which makes it possible to run ev3dev, a Debian-based operating system.
Lego Education Spike Prime[]
Spike Prime was announced in April 2019.[16] While not being part of the Mindstorms product line, the basic set includes three motors (1 large 2 medium) and sensors for distance, force and color[17] a controller brick based on an STM32F413 microcontroller[18] and 520+ LEGO Technic elements.[19]
Lego Mindstorms Robot Inventor[]
Lego Mindstorms Robot Inventor was announced in June 2020[20] and released later in autumn. It has four medium motors from Spike Prime, two sensors (distance sensor and color/light sensor) also from Spike Prime, a Spike Prime hub with a six-axis gyroscope, an accelerometer, and support for controllers and phone control. It also has 902+ LEGO Technic elements.
Programming languages[]
| Name | Device | Program Type | Language type(s) | Notes | Links | |||
|---|---|---|---|---|---|---|---|---|
| RCX | NXT | EV3 | Runs On Brick | Remote Control | ||||
| Actor-Lab | Custom flowchart-like language | |||||||
| Ada | Yes | Ada | Requires nxtOSEK | |||||
| Ada Interface to MindStorms | Ada | |||||||
| App Inventor | Yes | App Inventor | Specific support for LEGO(tm) MINDSTORMS(tm) NXT sensors and motors | |||||
| brickOS | Yes | No | No | C/C++ | website | |||
| Ch | C/C++ Interpreter | Control Lego Mindstorms in C/C++ interactively without compilation | ||||||
| clang | C, C++ | |||||||
| CoderZ | Yes | Yes | No | Java | Works with Blockly or with Java (using LejOS). Also includes an online 3D simulator[21] | website | ||
| Cpp4Robots | No | No | Yes | Yes | C/C++ | Cpp4Robots is extension(plugin) for Microsoft Visual Studio environment. This extension allows programming of Lego EV3 in native C/C++ language and in Microsoft Visual Studio development environment. This Cpp4Robots extension works with default firmware in EV3 Brick. | website | |
| DialogOS | Graphical Flowchart for voice controlled robots | DialogOS combines speech recognition and speech synthesis with robotics, enabling you to build talking robots that react to your voice commands. | ||||||
| Enchanting | Drag and drop, similar to NXT-G | Program your robots simply by dragging the line of functions. | ||||||
| EV3Basic | No | No | Yes | Yes | Yes | Microsoft Small Basic | website | |
| ev3_scratch | Yes | No | Yes | Scratch (programming language) | Scratch code runs in the browser relaying commands to EV3 robot over Bluetooth. | |||
| FLL NXT Navigation | Yes | Uses NXT-G and .txt files | ||||||
| GCC | C/C++, Objective-C, Fortran, Java, Ada, others | |||||||
| Gnikrap | No | No | Yes | Yes | Yes | JavaScript / Scratch like programming | website | |
| GNU Toolchain for h8300 | C/C++, ASM | |||||||
| HVM | Yes | Development environment for the Java programming language for the Mindstorms EV3, Eclipse-based | Works with Java 1.7. Works with the standard Lego firmware. Does not require a microSD card. Requires a wireless bluetooth dongle for the EV3 | website | ||||
| Interactive C | C-style language. | Language developed for the MIT Lego Robot Design Contest | ||||||
| jaraco.nxt | Yes | Yes | Python | Python modules providing low-level interfaces for controlling a Lego NXT brick via Bluetooth. Also includes code for controlling motors with an Xbox 360 controller using pyglet. | ||||
| LabVIEW | Yes | Yes | Yes | Yes | National Instruments LabVIEW visual programming language (G code) | Core language used to develop Mindstorms NXT software. Can use available add-on kit to create and download programs to NXT, create original NXT blocks or control robot directly via USB or Bluetooth using NXT fantom.dll | ||
| LEGO MINDSTORMS EV3 API for .NET | No | No | Yes | No | Yes | .NET, WinJS and C++ | A .NET API for the LEGO MINDSTORMS EV3 brick usable from desktop, Windows Phone and WinRT. With this API, you can connect, control and read sensor data from your LEGO EV3 brick over Bluetooth, WiFi, or USB. | website |
| Lego.NET | Anything that can compile to CIL, works best with C# | Does not come with a compiler, converts CIL to machine code | ||||||
| Lego::NXT | Yes | No | Yes | Perl | Set of Perl modules providing real-time low-level control of a Lego NXT brick over Bluetooth. | |||
| LegoLog | Prolog | Uses an NQC program to interpret commands send from the PC running the Prolog code | ||||||
| LegoNXTRemote | Yes | No | Yes | Objective-C | Remote control program for remotely operating and programming a Lego NXT Brick. Supports NXT 2.0 and 1.0, sensors, all 3 motors, automatic "steering" control, and running preloaded programs. | |||
| leJOS | Yes | Yes | Yes | Yes | Yes | Java | A java based system for advanced programmers can handle most sensors and things like GPS, speech recognition and mapping technology. Can be interfaced with the Eclipse IDE or run from the command line | |
| Lestat | C++ | Allows you to control the NXT directly from any C++ program in Linux. | ||||||
| librcx | C/C++ | A library for GCC | ||||||
| Logitech SDK | Visual Basic, Visual C++ | Can be combined with an RCX control library such as spirit.ocx from the MindStorms SDK to make use of the Lego Cam | ||||||
| Microsoft Visual Programming Language (VPL) | Yes | No | Yes | Graphical flowchart, based on .NET | With the Microsoft Robotics Studio, it uses a native NXT program msrs to send and receive messages to and from a controlling program on a computer via Bluetooth | |||
| Mindstorms SDK | Visual Basic, Visual C++, MindScript, LASM | You do not need VB to use the VB features as MS Office comes with a cut down version of VB for making macros | ||||||
| Monobrick | Yes | Yes | Yes | C# | .NET 4.5. Firmware running from SD card. | website | ||
| NQC | Yes | Yes | NQC, a C-like language | |||||
| NXT++ | C++ | Allows controlling the NXT directly from any C++ program, in Visual Studio, Windows. | ||||||
| NXT_Python | Yes | No | Yes | Python | NXT_Python is a package for controlling a LEGO NXT robot using the Python language. It can communicate via USB or Bluetooth. | |||
| NXT-Python | Yes | No | Yes | Python | Based on NXT_Python, includes additional advanced features, support for around 30 sensors, and multiple brick connection backends. Works on Windows, Linux, Mac. | |||
| NXTGCC | Assembly, C, makefiles, Eclipse, etc. | The first GCC toolchain for programming the Lego Mindstorms NXT firmware. | ||||||
| nxtOSEK | C/C++ | |||||||
| OCaml-mindstorm | OCaml | Module to control LEGO NXT robots using OCaml through the Bluetooth and USB interfaces. | ||||||
| OnScreen | A custom language which can be programmed directly on the RCX | |||||||
| pbForth | Yes | Forth | No longer developed. | |||||
| pbLua | Yes | API for the Lua programming language for the Mindstorms NXT, text-based | pBLua: ... is written in portable C, with minimal runtime requirements; can be compiled on the fly on NXT; is a small, easy to read, and easy to write language; has extensive documentation available online and in dead-tree format, and a very friendly newsgroup | website | ||||
| PBrickDev | PBrickDev, a flowchart based language. | Has more functionality than the RIS language, such as datalogs and subroutines/multithreading. | ||||||
| PRO-BOT | A kind of Visual Basic/spirit.ocx-based language | Designed for robots which are in contact with the workstation at all times | ||||||
| Processing | Yes | Java (Simplified / programmed C-style) | Processing (programming language) is an open source programming language and environment for people who want to program images, animation, and interactions. It is used by students, artists, designers, researchers, and hobbyists for learning, prototyping, and production. To control the NXT with Processing you can use the NXTComm Processing library developed by Jorge Cardoso. | |||||
| QuiteC | C | A library for use with GCC and comes with GCC for Windows. | ||||||
| RCX Code | Yes | RCX Code, a custom flowchart-based language | Included in the Mindstorms consumer version sold at toystore | |||||
| ROBOLAB | Yes | A flowchart language based on LabVIEW | This is the programming environment offered to schools who use MindStorms, supports the Lego Cam. The programming structure simulates a flowchart design structure almost icon by icon. Therefore, it helps users a great deal in terms of translating from a flowchart design to Robolab icons. | |||||
| RoboMind | Simple educational scripting language available from Arabic to Ukrainian. | The RoboMind learning environment allows to quickly develop and test scripts for a virtual robot environment. The scripts can then directly be transferred to a Lego Mindstorms NXT robot. It works on the standard firmware. | ||||||
| RoboRealm | A multi-platform language that works with IRobot Roomba, NXT, RCX, VEX, and many other popular robotic sets. This language is also capable for video processing using a webcam, this gives your robot excellent vision since it can filter out certain colors, lock-on to a certain area of color, display variables from the robot or computer, and much more. The software works with keyboard, joystick, and mouse. | |||||||
| Robot JavaScript | No | Yes | Yes | Yes | JavaScript | A compiler that compiles JavaScript code for EV3 robots. Includes syntax highlighting, code sharing, over 100 example programs, and verbose compiler messages. Object oriented language. Free. | website | |
| ROBOTC | Yes | Yes | Yes | Yes | An Integrated development environment targeted towards students that is used to program and control LEGO NXT, , RCX and Arduino robots using a programming language based on the C programming language. | ROBOTC gives the ability to use a text-based language based on the C language. It includes built-in debugger tools, as well as (but not limited to) code templates, Math/Trig operations (sin, cos, tan, asin, acos... etc.), user-friendly auto-complete function built into the interface, built-in sample programs. This deserves a special note for its debugging tool. For any developer, you will know how important it is to have a good debugging tool. Among all other robotics programming languages which support Mindstorms platform, RobotC's debugging environment does deserve a special note; although it is not free. | ||
| Robotics.NXT | Yes | Yes | Haskell | A Haskell interface over Bluetooth. It supports direct commands, messages and many sensors (also unofficial). It has also support for a simple message-based control of a NXT brick via remotely executed program (basic NXC code included). | ||||
| ROS | A Linux based library for writing robots. The stack "nxt" provides interface with the NXT. | |||||||
| ruby-nxt | Yes | Yes | Ruby | Provides low-level access to the NXT via Bluetooth as well as some preliminary high-level functionality. | ||||
| RWTH – Mindstorms NXT Toolbox | Yes | Yes | MATLAB | Interface to control the NXT from MATLAB via Bluetooth or USB (open-source). | ||||
| Simulink (LEGO MINDSTORMS NXT Support) | Yes | Simulink | Provides a one-click rapid programming tool for the NXT. C code is automatically generated from a graphical Simulink model. The code is then deployed and downloaded onto the NXT, from where it can be run. The Mathworks provides an array of graphical blocks that represent the various sensors and actuators that the NXT uses. | |||||
| SqLego | Squeak | |||||||
| Swift / Robotary | Yes | Yes | Swift (programming language) | Robotary is a Mac robotics studio that uses the Swift programming language. | website | |||
| TclRCX | Yes | Tcl | ||||||
| Terrapin Logo | LOGO | |||||||
| TinySoar | Soar | An implementation of the Soar artificial intelligence architecture that runs on the RCX brick. Soar incorporates acting, planning, and learning in a rule-based framework. | ||||||
| TinyVM | Yes | Java | A predecessor to the lejos language. An open source Java based replacement firmware for the Lego Mindstorms RCX microcontroller. | |||||
| Transterpreter (The) | Occam | |||||||
| TuxMinds | (Linux) GUI for various distributions, an open source IDE based on Qt. Supports a lot of bots. RCX, NXT and Asuro are predefined. | With the XML-based configuration file almost any kind of bot (or microcontroller) can be added. Own equipment can be added in the same manner. | ||||||
| URBI by Gostai for Lego Mindstorms NXT | URBI, C++, Java, Matlab | Easy to use parallel and event-driven script language with a component architecture and opensource interfaces to many programming languages. It also offers voice/speech recognition/synthesis, face recognition/detection, Simultaneous localization and mapping, etc. | ||||||
| Vision Command | Yes | RCX Code | The official programming language for use with the Lego Cam, that allows you to control your robot with color, motion, and flashes of light. | |||||
| XS | Lisp | |||||||
Use in education[]
Mindstorms kits are also sold and used as an educational tool, originally through a partnership between Lego and the MIT Media Laboratory.[22][23] The educational version of the products is called Mindstorms for Schools or Mindstorms Education, and later versions come with the ROBOLAB GUI-based programming software, developed at Tufts University[24] using the National Instruments LabVIEW as an engine. In addition, the shipped software can be replaced with third party firmware and/or programming languages, including some of the most popular ones used by professionals in the embedded systems industry, like Java and C. One of the differences between the educational series, known as the "Challenge Set", and the consumer series, known as the "Inventor Set", is that it includes another touch sensor and several more gearing options. However, there are several other standouts between the two versions that one may not recognize unless doing a side by side analysis of what each offers. The version sold through LEGO Education is designed for a deeper level of learning or teaching that often happens in a classroom or school setting. The LEGO Education version comes with support called the Robot Educator. This includes 48 tutorials to walk the learner through the basics of coding to more sophisticated and complex concepts such as data logging. These resources to support the learner and/or educator are not included in the retail version of Mindstorms. It's always a good idea to reach out to a LEGO Education consultant to inquire of other differences as there are several more. The retail version was designed for more of a home/toy use vs the educator model, which was designed to support deeper learning with extra resources and pieces. This is why the LEGO Education Mindstorms contains more sensors and parts than the retail version.
Community[]
There is a strong community of professionals and hobbyists of all ages involved in the sharing of designs, programming techniques, creating third-party software and hardware, and contributing of other ideas associated with Lego Mindstorms. The Lego Mindstorms system/website is organized much like a wiki, harnessing the creative potential and collaborative efforts of participants. Lego also encourages sharing and peering by making software code available for downloading and by holding various contests and events.
See also[]
- FIRST Lego League
- WRO (World Robot Olympiad)
- Robofest
- FIRST Tech Challenge
- RoboCup Junior
- Big Trak
- iRobot Create
- Robotis Bioloid
- The Robotic Workshop
- Robotics suite
- C-STEM Studio
- Botball
References[]
- ^ Jump up to: a b c d e f g h Beland, Cristopher (15 December 2000). LEGO Mindstorms: The Structure of an Engineering (R)evolution (conference paper). Docket 6.399J Structure of Engineering Revolutions. Archived from the original on 27 January 2021. Retrieved 25 March 2019.
- ^ Jump up to: a b Papert, Seymour (1993) [1980]. Mindstorms: Children, Computers, and Powerful Ideas. New York: Basic Books. ISBN 978-0-465-04674-4.
- ^ Jump up to: a b c d "To Mindstorms and Beyond: Evolution of a Construction Kit for Magical Machines" (PDF). MIT Media Laboratory. Archived (PDF) from the original on 22 August 2017. Retrieved 15 December 2017.
- ^ Jump up to: a b c Resnick, Mitchel; Ocko, Stephen (1 January 1991). "LEGO/Logo: Learning through and about design". MIT Media Lab (Thesis). Massachusetts Institute of Technology (MIT). Retrieved 13 August 2021.
- ^ Jump up to: a b c d e Martin, Fred (August 1988). "Children, Cybernetics, and Programmable Turtles" (PDF) (Thesis). Massachusetts Institute of Technology (MIT). Retrieved 13 August 2021.
- ^ Jump up to: a b c d Askildsen, Tormod (4 December 2018). "LEGO Mindstorms reflections – What happened before the announcement in January 1998". lan.Lego.com. The LEGO Group. Archived from the original on 26 March 2019. Retrieved 26 March 2019.
- ^ Jump up to: a b c d Oliver, David; Roos, Johnathan (2003). "Dealing with the unexpected: Critical incidents in the LEGO Mindstorms team". Human Relations. 56 (9): 1057–1082. doi:10.1177/0018726703569002. S2CID 145417935. Archived from the original on 27 January 2021. Retrieved 26 March 2019.
- ^ Hocker, Matt (3 February 2020). "A History of LEGO Education, Part 3: Mindstorms over matter [Feature]". The Brothers Brick. Retrieved 15 August 2021.
- ^ "ROBOTICS DISCOVERY SET - INFO FOR HACKERS". 10 February 2001. Archived from the original on 10 February 2001.
- ^ Kekoa Proudfoot (1999). "RCX Internals". mralligator.com. Archived from the original on 11 November 2018. Retrieved 14 December 2018.
- ^ "DSC03489.jpg". flickr.com. 20 November 2008. Archived from the original on 17 November 2016. Retrieved 4 April 2018.
- ^ "What's NXT? LEGO Group Unveils LEGO MINDSTORMS NXT Robotics Toolset at Consumer Electronics Show". Press Release. LAS VEGAS: LEGO Company. 4 January 1986. Archived from the original on 8 July 2009. Retrieved 3 December 2008.
- ^ "Lego Robotics FAQ". 2009. Archived from the original on 8 August 2010. Retrieved 2 March 2010.
- ^ "EV3-Overview". Archived from the original on 24 June 2013.
- ^ Crook, Jordan. "LEGO Mindstorms EV3: The Better, Faster, Stronger Generation of Robotic Programming". TechCrunch. Archived from the original on 23 October 2017. Retrieved 22 May 2015.
- ^ "A new hands-on learning approach for classrooms, announced today". www.lego.com. Archived from the original on 10 August 2020. Retrieved 8 January 2021.
- ^ "LEGO® Education SPIKE™ Prime Set 45678 | LEGO® Education | Buy online at the Official LEGO® Shop US". www.lego.com. Archived from the original on 3 December 2020. Retrieved 8 January 2021.
- ^ "gpdaniels/spike-prime". 25 January 2021. Archived from the original on 25 December 2020. Retrieved 8 January 2021 – via GitHub.
- ^ Porter, Jon (15 June 2020). "Lego's new Mindstorms kit lets kids build their own walking, talking robots". The Verge. Retrieved 7 September 2021.
- ^ "New LEGO® MINDSTORMS® Robot Inventor lets creators build and bring to life anything they can imagine". www.lego.com. Archived from the original on 15 January 2021. Retrieved 8 January 2021.
- ^ "CoderZ, an online learning environment for MINDSTORMS robotics". www.thenxtstep.com. Archived from the original on 14 June 2017. Retrieved 30 May 2017.
- ^ "The MIT Programmable Brick". Epistemology and Learning Group. Massachusetts Institute of Technology. 13 February 1998. Archived from the original on 25 October 2005. Retrieved 1 October 2013.
- ^ "Programmable Bricks". Projects. MIT Media Lab. Archived from the original on 21 October 2013. Retrieved 3 December 2008.
- ^ Erwin, Ben; Cyr, Martha; Rogers, Chris (2000). "LEGO Engineer and RoboLab: Teaching Engineering with LabVIEW from Kindergarten to Graduate School" (PDF). International Journal of Engineering Education. 16 (3): 181–192. Archived (PDF) from the original on 23 September 2013. Retrieved 1 October 2013.
For the past 6 years, faculty members at Tufts University have developed two different software packages between LabVIEW and Lego data acquisition systems. These packages allow us to teach engineering with both Lego bricks and LabVIEW to students from 5 to 50 years old. The versatility of the hardware and software allow a wide variety of possibilities in what students can build and program, from robots and remote sensing devices to kinetic sculptures. As students design and build their projects, they are motivated to learn the math and science needed to optimize their project. Both college students and kindergartners respond to this motivator. In the paper, we explain how we designed software to complement these projects in allowing automation and animation. The software uses LabVIEW, extending its capabilities to kindergartners and Lego bricks. Finally, we will show how we have used LabVIEW and Lego data acquisition to teach elementary school science, freshman engineering, instrumentation and experimentation, and how college seniors and graduate students have used both the hardware and software to solve various data acquisition problems
Additional references[]
- Bagnall, Brian. Maximum LEGO NXT: Building Robots with Java Brains. Variant Press. 2007. ISBN 0-9738649-1-5.
- Bagnall, Brian. Core LEGO Mindstorms. Prentice-Hall PTR. 2002. ISBN 0-13-009364-5.
- Baum, Dave. Definitive Guide to LEGO MINDSTORMS, 2nd ed. Apress. 2002. ISBN 1-59059-063-5.
- Erwin, Benjamin. Creative Projects with LEGO Mindstorms (book and CD-ROM). Addison-Wesley. 2001. ISBN 0-201-70895-7.
- Ferrari et al. Building Robots with LEGO Mindstorms: The Ultimate Tool for Mindstorms Maniacs. Syngress. 2001. ISBN 1-928994-67-9.
- Gindling, J., A. Ioannidou, J. Loh, O. Lokkebo, and A. Repenning., "LEGOsheets: A Rule-Based Programming, Simulation and Manipulation Environment for the LEGO Programmable Brick", Proceeding of Visual Languages, Darmstadt, Germany, IEEE Computer Society Press, 1995, pp. 172–179.
- Breña Moral, Juan Antonio. Develop LeJOS programs Step by Step, "http://www.juanantonio.info/lejos-ebook/".
External links[]
| Wikimedia Commons has media related to Lego Mindstorms. |
| show Lego |
|---|
| Authority control: National libraries |
|---|
- Lego Mindstorms
- 1998 in robotics
- Educational toys
- Electronic toys
- Embedded systems
- Products introduced in 1998
- Robot kits